Виды и устройство регуляторов оборотов коллекторных двигателей
Коллекторные двигатели часто можно встретить в бытовых электроприборах и в электроинструменте: стиральная машина, болгарка, дрель, пылесос и т. д. Что совсем не удивительно, ведь коллекторные двигатели позволяют получать и высокие обороты, и большой крутящий момент (в том числе высокий пусковой момент) — что и нужно для большинства электроинструментов.
При этом коллекторные двигатели могут питаться как постоянным током (в частности — выпрямленным), так и переменным током от бытовой сети. Для управления скоростью вращения ротора коллекторного двигателя применяют регуляторы оборотов, о них и пойдет речь в данной статье.

Для начала вспомним устройство и принцип работы коллекторного двигателя. Коллекторный двигатель включает в себя обязательно следующие части: ротор, статор и щеточно-коллекторный коммутационный узел. Когда питание подается на статор и на ротор, их магнитные поля начинают взаимодействовать, ротор начинает в итоге вращаться.
Питание на ротор подается через графитовые щетки, плотно прилегающие к коллектору (к ламелям коллектора). Для изменения направления вращения ротора, необходимо изменить фазировку напряжения на статоре или на роторе.

Обмотки ротора и статора могут питаться от разных источников или же могут быть соединены параллельно либо последовательно друг с другом. Так различаются коллекторные двигатели параллельного и последовательного возбуждения. Именно коллекторные двигатели последовательного возбуждения можно встретить в большинстве бытовых электроприборов, поскольку такое включение позволяет получить устойчивый к перегрузкам двигатель.
Говоря о регуляторах оборотов, прежде всего остановимся на самой простой тиристорной (симисторной) схеме (смотрите ниже). Данное решение применяется в пылесосах, стиральных машинах, болгарках, и показывает высокую надежность при работе в цепях переменного тока (особенно от бытовой сети).
Работает данная схема достаточно незатейливо: на каждом периоде сетевого напряжения конденсатор заряжается через резистор до напряжения отпирания динистора, присоединенного к управляющему электроду основного ключа (симистора), после чего симистор открывается и пропускает ток к нагрузке (к коллекторному двигателю).
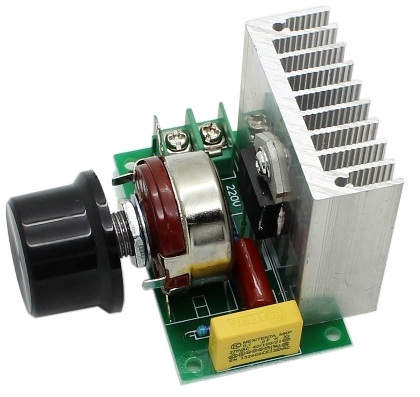
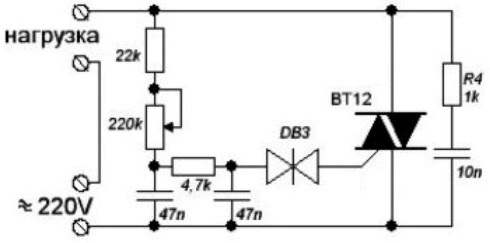
Регулируя время зарядки конденсатора в цепи управления открыванием симистора, регулируют среднюю мощность подаваемую на двигатель, соответственно регулируют обороты. Это простейший регулятор без обратной связи по току.
Симисторная схема похожа на обычный диммер для регулировки яркости ламп накаливания, обратной связи в ней нет. Чтобы появилась обратная связь по току, например чтобы удерживать приемлемую мощность и не допускать перегрузок, необходима дополнительная электроника. Но если рассмотреть варианты из простых и незатейлевых схем, то за симисторной схемой следует реостатная схема.
Реостатная схема позволяет эффективно регулировать обороты, но приводит к рассеиванию большого количества тепла. Здесь требуется радиатор и эффективный отвод тепла, а это потери энергии и низкий КПД в итоге.
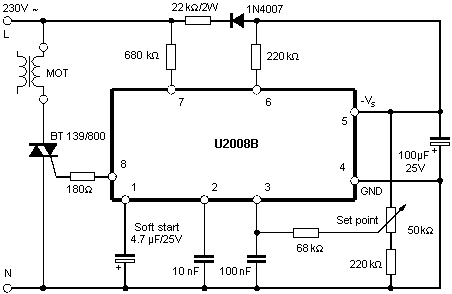
Более эффективны схемы регуляторов на специальных схемах управления тиристором или хотя бы на интегральном таймере. Коммутация нагрузки (коллекторного двигателя) на переменном токе осуществляется силовым транзистором (или тиристором), который открывается и закрывается один или несколько раз в течение каждого периода сетевой синусоиды. Так регулируется средняя мощность, подаваемая на двигатель.
Схема управления питается от 12 вольт постоянного напряжения от собственного источника или от сети 220 вольт через гасящую цепь. Такие схемы подходят для управления мощными двигателями.
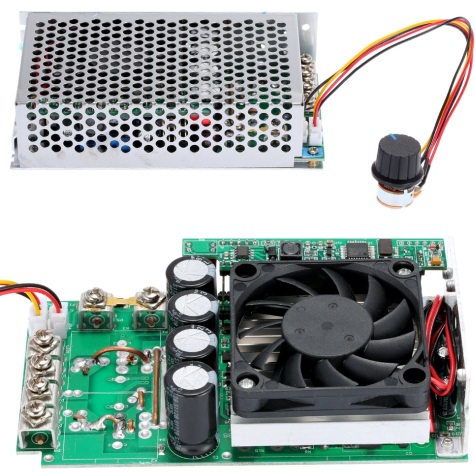
Принцип регулирования с микросхемами на постоянном токе — это конечно ШИМ — широтно-импульсная модуляция. Транзистор, например, открывается с строго заданной частотой в несколько килогрец, но длительность открытого состояния регулируется. Так, вращая ручку переменного резистора, устанавливают скорость вращения ротора коллекторного двигателя. Данный метод удобен для удержания малых оборотов коллекторного двигателя под нагрузкой.
Более качественное управление — именно регулировка по постоянному току. Когда ШИМ работает на частоте порядка 15 кГц, регулируя ширину импульсов, управляют напряжением при примерно одном и том же токе. Скажем, регулируя постоянное напряжение в диапазоне от 10 до 30 вольт, получают разные обороты при токе порядка 80 ампер, добиваясь требуемой средней мощности.
Если вы хотите изготовить простой регулятор для коллекторного двигателя своими руками без особых запросов к обратной связи, то можно выбрать схему на тиристоре. Потребуется лишь паяльник, конденсатор, динистор, тиристор, пара резисторов и провода.
Если же нужен более качественный регулятор с возможностью поддержания устойчивых оборотов при нагрузке динамического характера, присмотритесь к регуляторам на микросхемах с обратной связью, способным обрабатывать сигнал с тахогенератора (датчика скорости) коллекторного мотора, как это реализовано например в стиральных машинах.
Обратите внимание! Только 11 ноября 2020 года главная распродажа года на Алиэкспресс: Товары на Алиэкспресс с самыми большими скидками
Источник
Регулятор оборотов двигателя постоянного тока 12 вольт

На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1 . Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3 . Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4. Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.


Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).

Примечание 1. Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
 Принципиальная электрическая схема
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.

Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.


Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.


Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).

Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).

Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.

Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.

Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы . Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .


Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Источник
Как регулировать обороты двигателя постоянного тока через Arduino
Наверное, каждый пацан в своём детстве разбирал игрушки и нередко находил в них небольшие моторчики. Кто их подключал напрямую к батарейке помнит, что они начинали вращаться, а направление вращения зависело от того какую подать полярность на его клеммы. В простоте регулировки и реверсирования и состоит прелесть электродвигателей постоянного тока (ДПТ).
Вообще, правильное название миниатюрных двигателей — это коллекторный двигатель постоянного тока с постоянными магнитами или модельный электродвигатель. Магниты в них располагаются на статоре и играют роль обмотки возбуждения. Модельными они называются из-за того, что их часто используют в радиоуправляемых моделях.
Регулировка оборотов
Известно, что при подключении такого двигателя к источнику питания он сразу начинает вращаться, а направление его вращения зависит от полярности подключенного напряжения.
При изменении питающего напряжения изменяется ток в обмотках, следовательно изменяется и подводимая мощность и его обороты. Есть два основных способа изменения напряжения на клеммах таких электродвигателей — использовать балластные резисторы для ограничения тока или использовать ШИМ-регулирование.
Балластные резисторы греются, выделяют энергию в виде тепла в воздух – это не эффективно и бесполезно.
Смысл ШИМ-регулирования состоит в подаче импульсов с фиксированной частотой, но изменяющейся шириной. От ширины импульса зависит действующее напряжение на подключенной нагрузке и вычисляется по формуле:
где Uнагр – напряжение на нагрузке, Uпит – напряжение источника питания, k – коэффициент заполнения.
Коэффицент заполнения – то отношение ширины импульса (tимп) к периоду (T), то есть:
На рисунке ниже вы видите, как выглядит питание нагрузки через ШИМ-регулятор при разных коэффициентах заполнения.
Короче говоря,при ШИМ-регулировании питание очень быстро включается и отключается, то есть подаётся импульсами. И чем уже эти импульсы – тем меньшее напряжение доходит до нагрузки.
Для ШИМ-регулирования можно собрать схему на таймере NE555 и других микросхемах либо использовать микроконтроллер.
Семейство плат с микроконтроллером ардуино также способно выдавать ШИМ сигнал, стандартная частота ШИМ у них 500Гц, а если быть точным, то 488,28 Гц. Если вам не принципиальная частота – то можно использовать как есть без сторонних библиотек. Отмечу, что для большинства применений этого достаточно. Не очень хорошо это подходит для регулирования яркости осветительных приборов из-за повышения коэффициента пульсаций светильника и вреда для зрения в итоге.
Обратите внимание на иллюстрацию, приведенную выше. Из неё мы видим микроконтроллер Atmega328, который лежит в основе этих плат выдаёт ШИМ-сигнал только на выходах 3, 5, 6, 9, 10, 11, которые обычно помечены знаком «
» плате, а на картинках с распиновками сокращением «PWM».
Подключение к Arduino
Напрямую к порту ардуино подключать нагрузку для диммирования нельзя, так как он может выдать всего 20 мА. То есть напрямую к порту можно подключать отдельные маломощные 5-мм светодиоды, во всех остальных случаях – используйте транзистор. В последнем случае максимальная нагрузка зависит от типа транзистора.
Как мы уже определились ШИМ у нас выдают только пины с номерами 3, 5, 6, 9, 10, 11. Значит, к ним и будем подключать нагрузку. В качестве транзистора предлагаю использовать полевой транзистор (MOSFET) IRF840 – он N-канальный со встроенным обратным диодом для защиты от всплесков противо-ЭДС, его характеристики:
- Предельно допустимое напряжение сток-исток (Uds): 500 V
- Предельно допустимое напряжение затвор-исток (Ugs): 20 V
- Пороговое напряжение включения Ugs(th): 4 V
- Максимально допустимый постоянный ток стока (Id): 8 A
Можно использовать и другие транзисторы с логическим уровнем включения затвора ( Ugs(th) до 5В), в противном случае придется использовать драйвер или промежуточный транзистор для его открытия.
Кроме транзистора нам нужно 2 резистора — первый между выходом платы и затвором на 240 Ом (если его у вас нет – возьмите соседние номиналы) для ограничения тока заряда затворной ёмкости, так мы снизим вероятность выхода из строя порта и просадок по питанию. Второй резистор на 10-12 кОм подключим между затвором и землёй. Он нужен для того, чтобы затвор не висел в воздухе, а также разряда затворной ёмкости и ускорения закрытия полевика. Схему подключения вы видите ниже.
Чтобы задавать обороты, добавим в схему потенциометр, его подключим к аналоговому входу так, как мы делали это в прошлых статьях о сервоприводах и шаговых двигателях .одключение по
Соберем эту схему.
Для ШИМ в родной библиотеке Arduino IDE есть специальная функция — analogWrite (pin, value), в ней pin – номер порта, на который нужно выдавать сигнал, а value – его величина от 0 до 255. То есть при значении value равном 255 коэффициент заполнения на выходе будет равен 1, т.е. будет непрерывный сигнал на входе, а при 127 — почти 50%.
Для нашего эксперимента достаточно простенького кода, который вы видите далее.
int pot = A1; // назначаем вход А1 для чтения сигнала с потенциометра
int motor = 5; // к этому выходу подключаем затвор полевого тразнистора
analogWrite(motor, map (analogRead(pot), 0, 1023, 0, 255));
Функция map, которая используется в качестве второго аргумента функции analogWrite позволяет сократить код на несколько строчек. Её назначение преобразовать одни размерности в другие. Чтобы понять, как она работает рассмотрим её синтаксис:
map(value, fromLow, fromHigh, toLow, toHigh),
где: value – откуда брать величину, в приведенном выше примере мы её считываем функцией analogRead с пина, объявленного в переменной pot (это А1), fromLow – минимальное значение, которое будет участвовать в преобразовании (у нас это 0), fromHigh – максимальное значение для преобразования (у нас это 1023, потому что это максимальное значение, которое «видит» ардуина при чтении аналогового сигнала), toLow – в какое значение преобразовывать минимальное значение со входа, toHigh – в какое значение преобразовывать максимальное значение со входа (у нас это 255, потому что это максимальное число, которое можно записать в analogWrite).
То есть мы получаем любое число от 0 до 1023, а функция возвращает число от 0 до 255. Таким образом, у нас происходит преобразование, в общем-то, с сохранением величины в процентах (комментаторов прошу подсказать, как правильно назвать такое преобразование).
Заключение
ШИМ-регуирование с помощью ардуино реализуется достаточно просто. Оно с лёгкостью может использовать в самодельных радиоуправляемых моделях или роботах, а также для регулировки яркости каких-либо индикаторов и создания световых эффектов. Повторюсь, что для диммирования светильников и светодиодных лент он не очень хорошо подходит из-за низкой частоты.
Также отмечу, что при питании платы от одного источника питания, а нагрузки от другого, например, с большим напряжением, следует соединить их «минусы», иначе транзистор включаться не будет.
Ну и прилагаем видео, в котором иллюстрируется работа схемы рассмотренной в статье
Источник